As mentioned, up next is electronics, always a highlight!
I've never been very good at soldering. I thought maybe a new tip for the soldering iron would help, and boy did it ever. Originally had a "screwdriver" tip, so I ordered the pointiest tip I could find.
Here's a pic, just for fun:
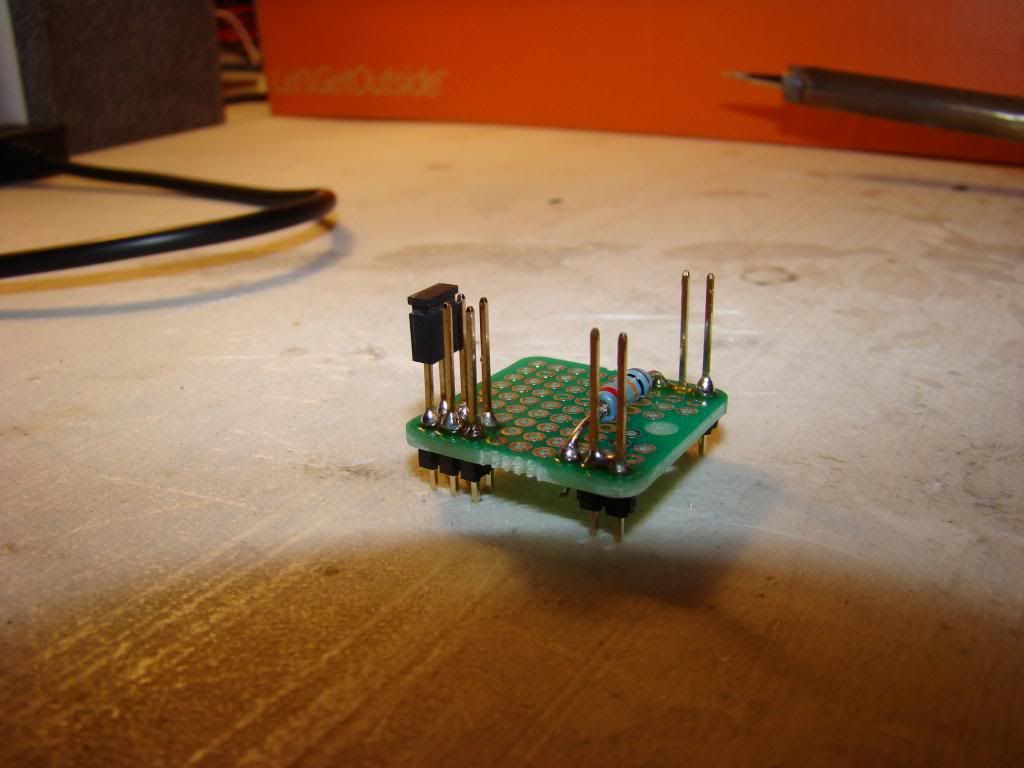
Here's a pic of one of my small boards:
This one adds the 10k resistor between the wireless receiver's power (red) and data (brown) lines, and since there was plenty of extra space, I made a spot for common grounding of the components.
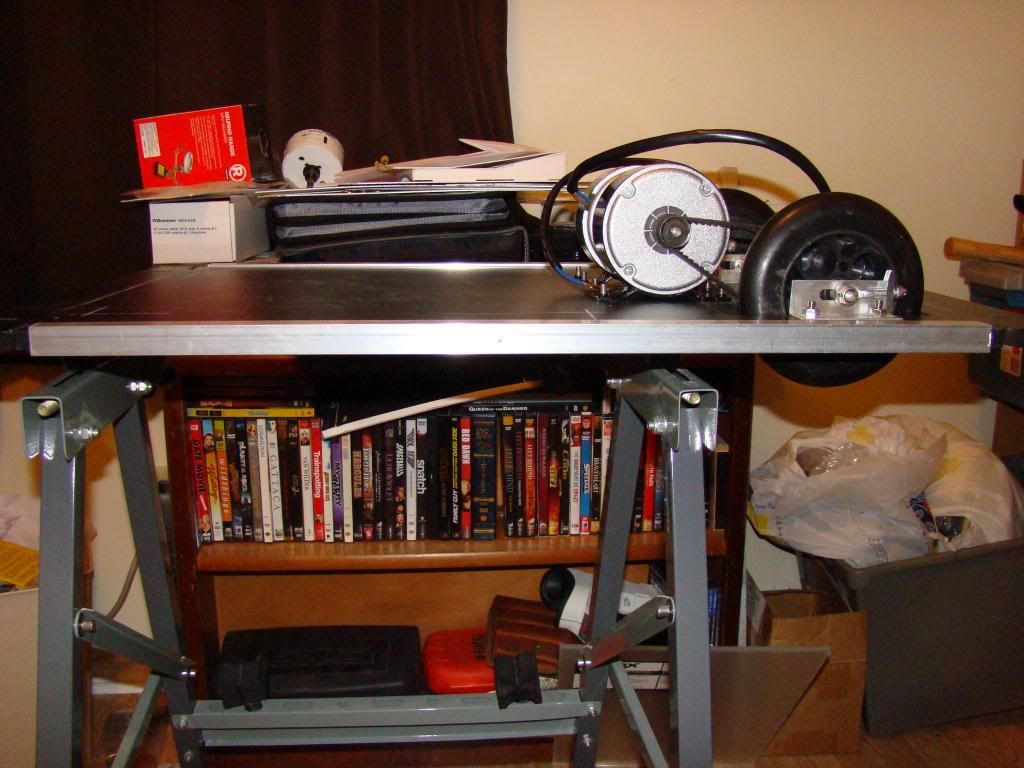
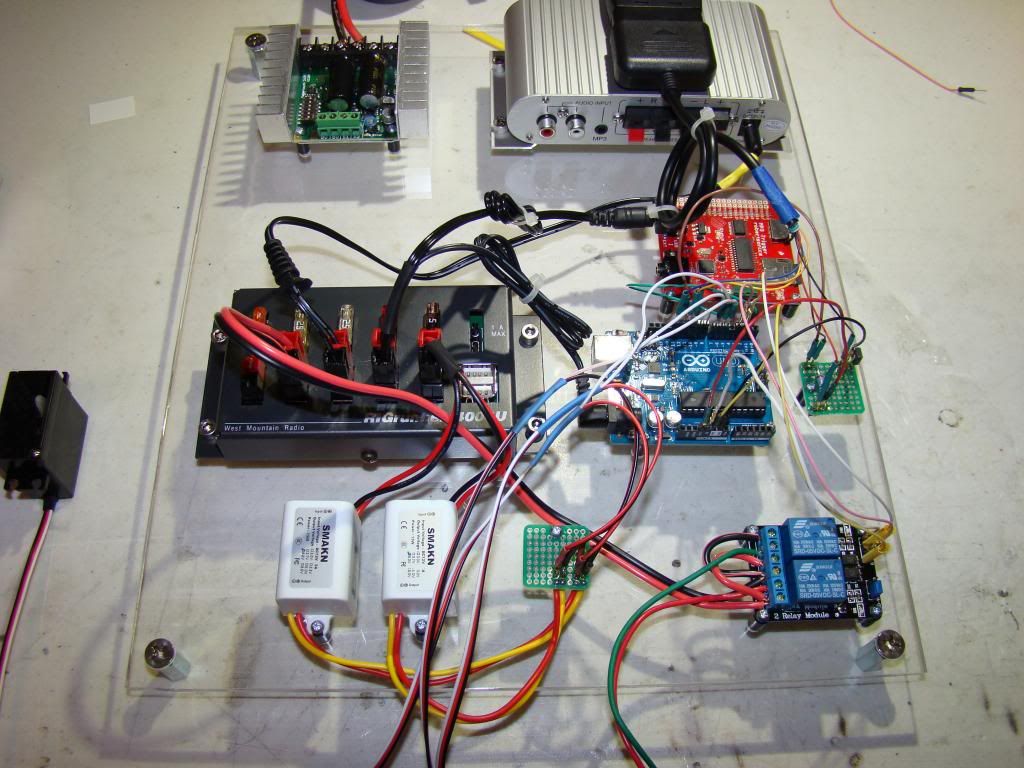
Here's a pic of everything laid out in what'll wind up being the final layout:
From top to bottom, there's the speakers, the silver audio amp, the green SaberTooth 2x25 speed controller, the red MP3 Trigger, the RIGRunner fuse block, the blue Arduino Uno, the small green board I showed in the previous picture, the white 12v-6v DC-DC converters, the blue dual-channel relays, and another small green board I made, that's for splitting out the power from the DC-DC converters. Phew, that was a mouthful.
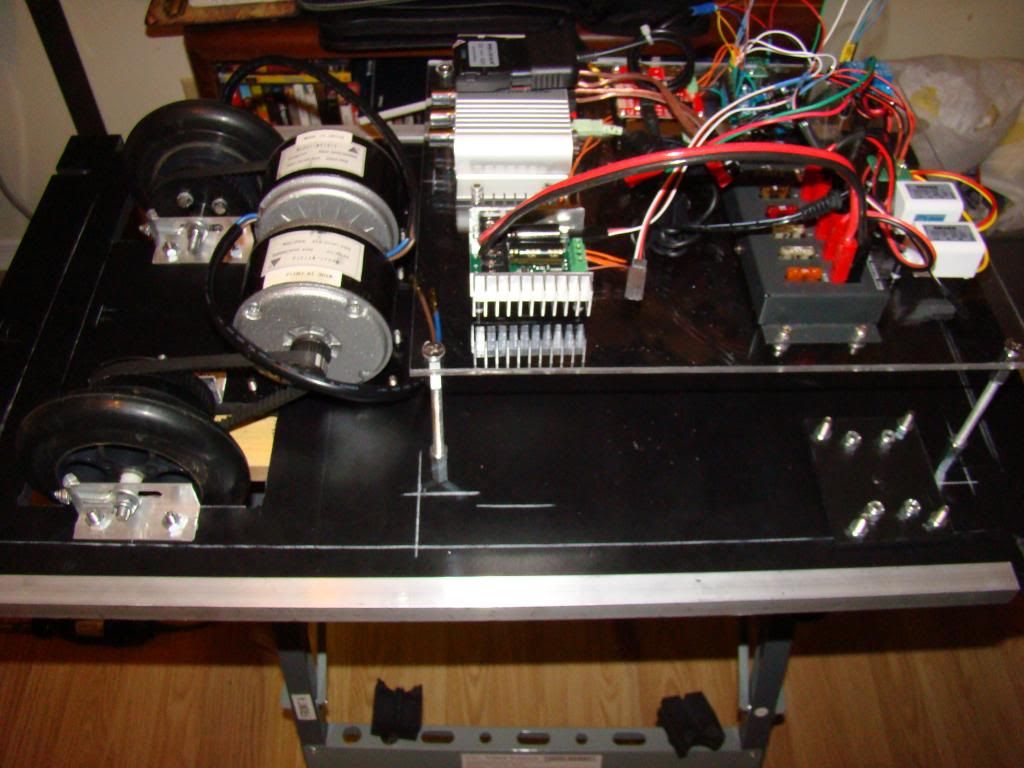
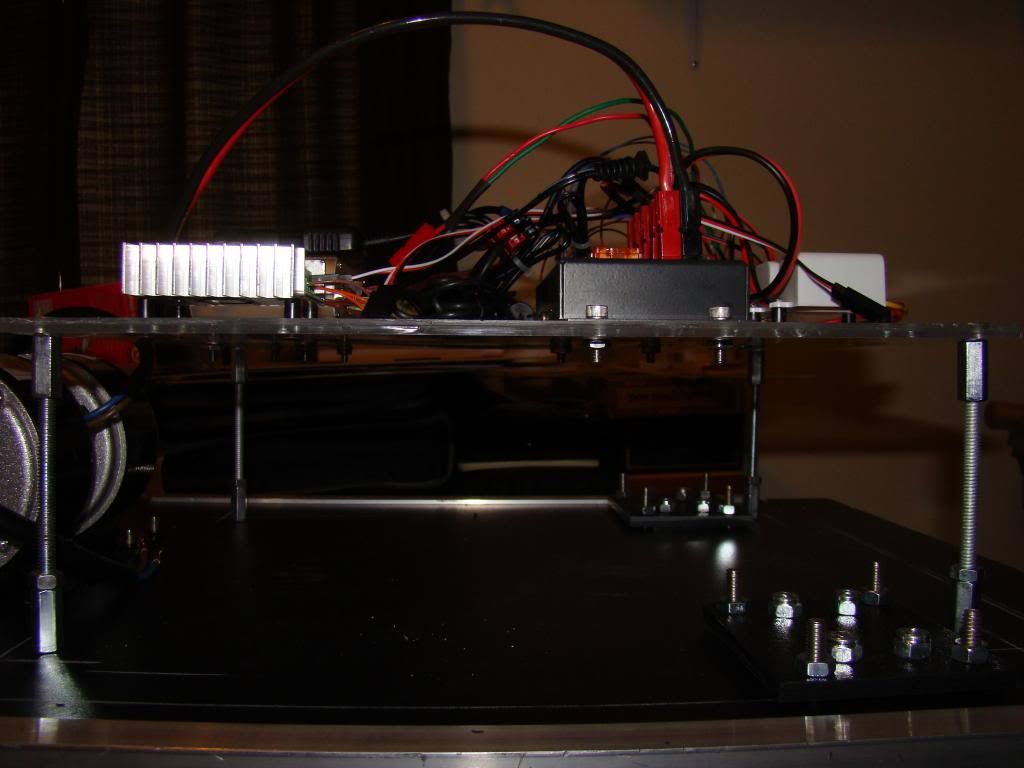
Here's a shot of all of that stuff with more wires connected :
And a shot of everything mounted on the board:
You can see that the SaberTooth isn't connected yet, that'll come along later.











BS(oS9HS,!~~60_103.JPG?set_id=880000500F)